Riferimento del sistema
Sistema di movimentazione per alloggiamenti di robot
Soluzioni di sistema | Soluzioni robotiche | Robot industriali
Cambioutensile
Serie WWR1000

- Sistemi cambioutensile per carichi pesanti con assorbimento dei momenti fino a 12.000 Nm
- Peso maneggiabile fino a 1000 kg
Pinze parallele a due ganasce
Serie GP400

1. Cambioutensile

- Sistemi cambioutensile per carichi pesanti con assorbimento dei momenti fino a 12.000 Nm
- Peso maneggiabile fino a 1000 kg


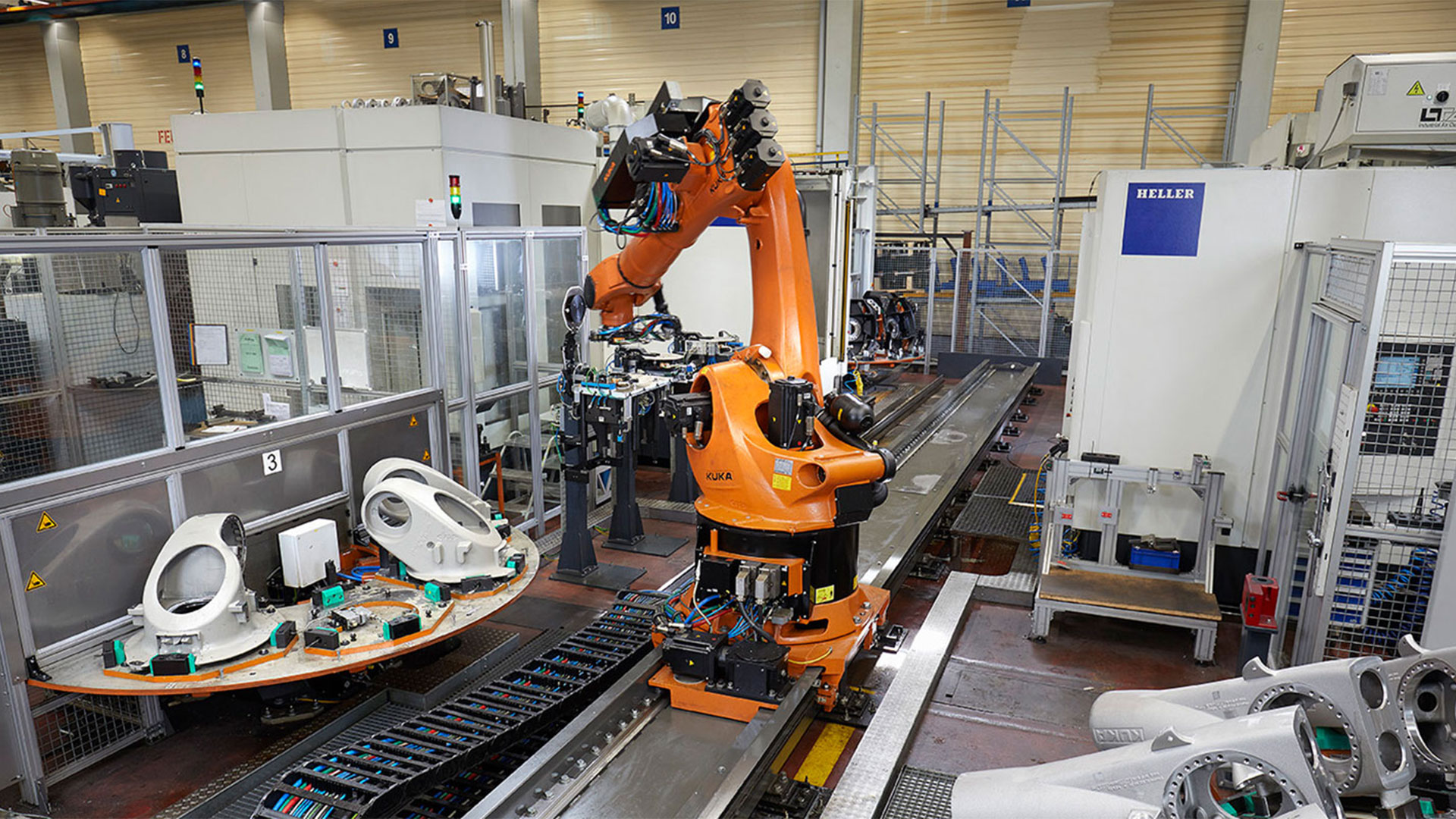
Obiettivo
Tre centri di lavoro dovevano essere collegati tra loro con un robot. Poiché l'automazione è stata installata in un secondo momento, lo spazio richiesto e quindi le dimensioni del robot erano limitate. Inoltre, le macchine dovevano essere utilizzate per una grande varietà di pezzi.
Soluzione
Data la varietà dei pezzi, è stato utilizzato un cambio automatico delle pinze. Le pinze sono state progettate per ottimizzare il peso, in modo da poter utilizzare un robot compatto.
Highlights e dati tecnici
 IP40
IP40 Pneumatici
Pneumatici Presa esterna
Presa esterna Presa interna
Presa interna
Dati tecnici
| Tipo di alimentazione | PNEU |
| Forza di presa max. | 6600 [N] |
| Progetto pinza | FORM |
| Sicurezza di presa | KLE |
| Corsa max. | 200 [mm] |
| Classe IP | IP40 |
| Peso del sistema | 112 [kg] |
Componenti standard integrati